 Description
Work done in 1998
Results
Work done in 1999 and results
Bibliography
Description
Work done in 1998
Results
Work done in 1999 and results
Bibliography
 Version française
Version française
 Go back to my research page.
Go back to my research page.
Description
Work done in 1998
Results
Work done in 1999 and results
Bibliography
 Description
Laparoscopy is a surgery technique with minimum invading:
an optic fiber (with a lighting feature) displays on a monitor
an image of the active area (with a by 3 zoom),
and adapted tools are introduced by pipes having a similar diameter.
Description
Laparoscopy is a surgery technique with minimum invading:
an optic fiber (with a lighting feature) displays on a monitor
an image of the active area (with a by 3 zoom),
and adapted tools are introduced by pipes having a similar diameter. 
Work done in 1998
With Raphael, I work on real-time realistic rendering
of the liver surface and the instruments effects on it.
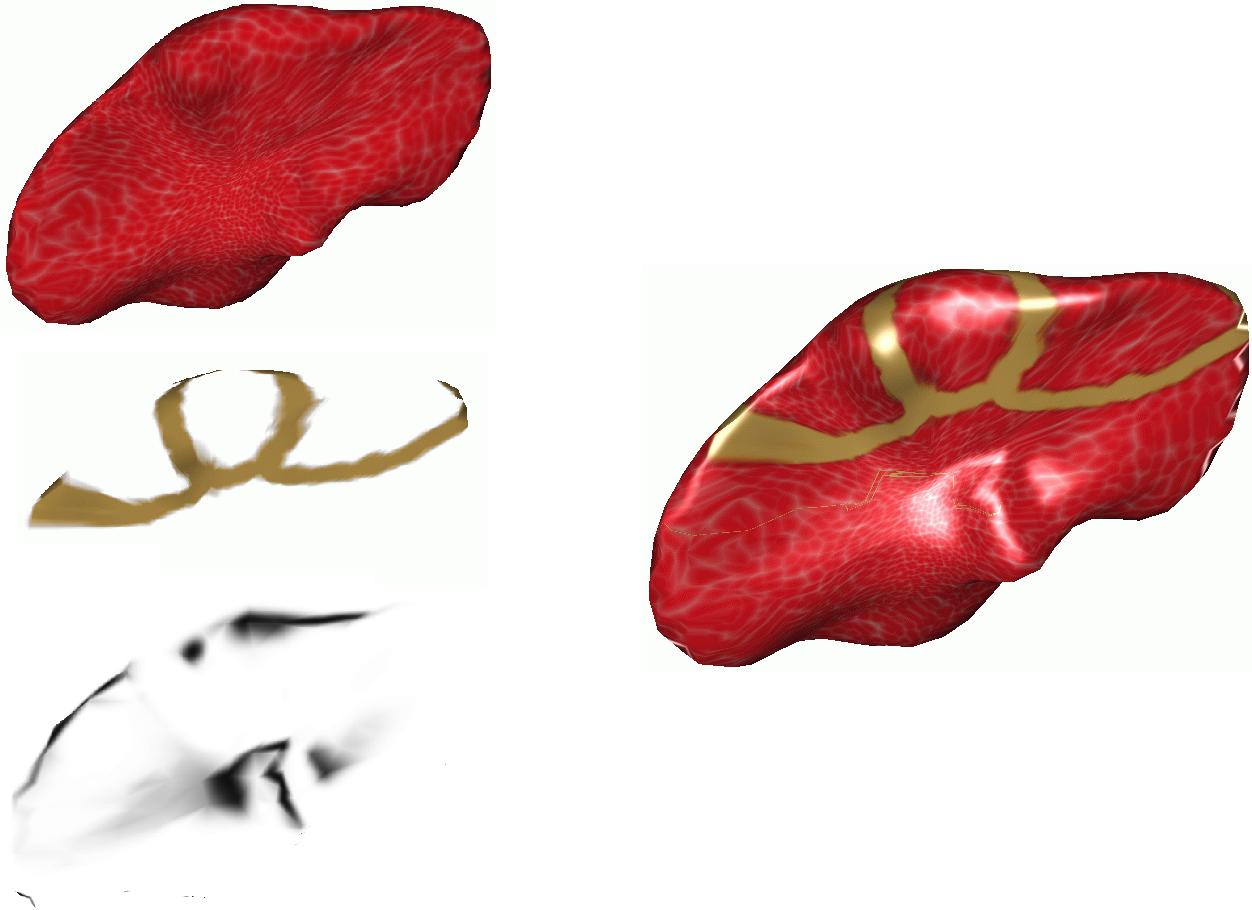

 Results in 1998
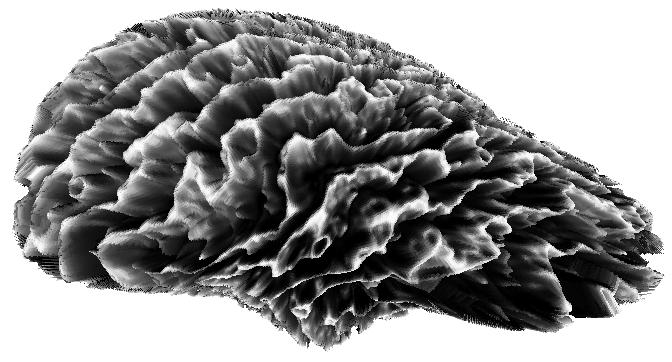
Liver mesh at a given simulation time step.
Results in 1998
Liver mesh at a given simulation time step.
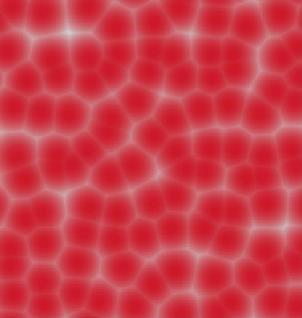
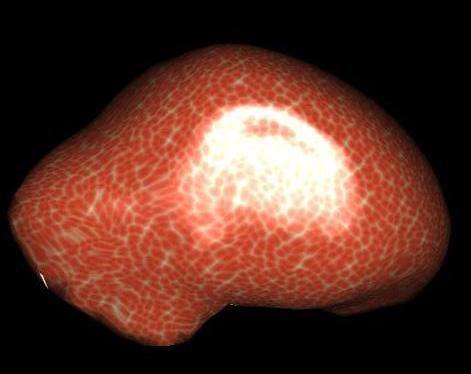
 Real-time rendering of the aspect (Raphael Heiss work), with
the skin, the surgery marks, and reflects:
Real-time rendering of the aspect (Raphael Heiss work), with
the skin, the surgery marks, and reflects: 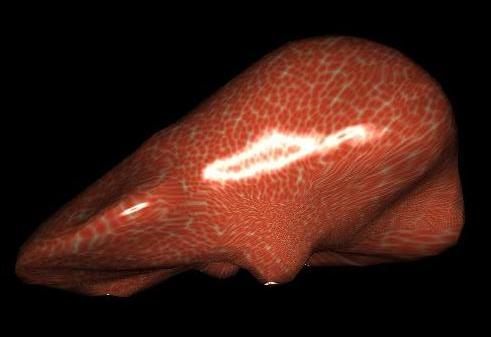
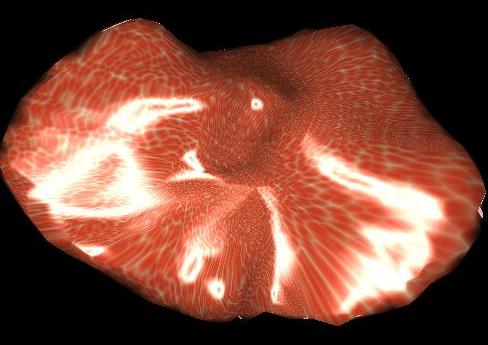
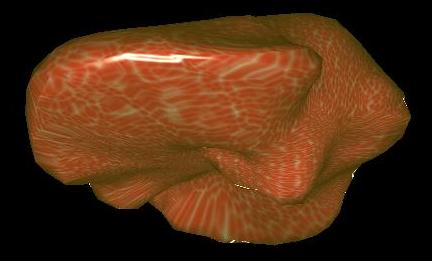
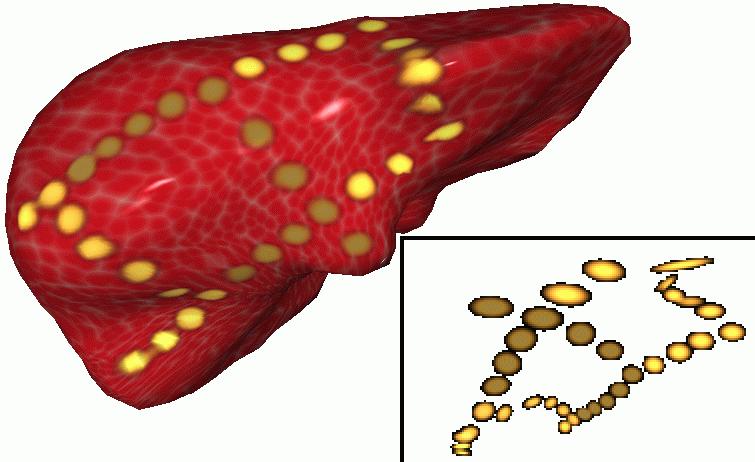
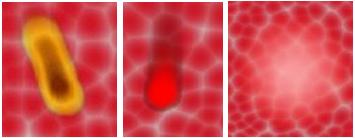
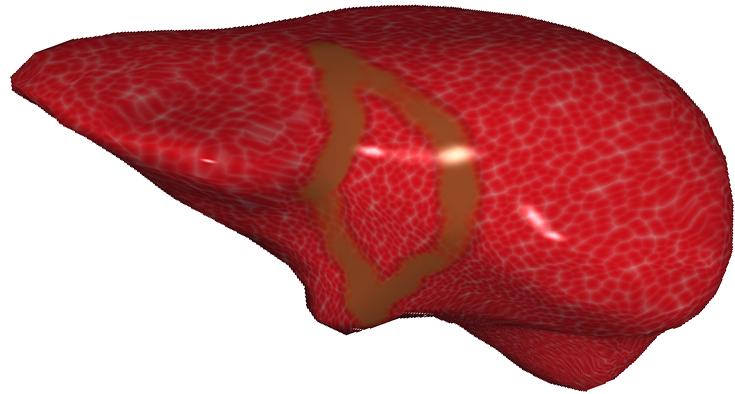 Application of the Volumetric Textures
to the surgery simulation (despits the case of the liver is totally unadapted!).
Application of the Volumetric Textures
to the surgery simulation (despits the case of the liver is totally unadapted!).
Travaux en 1999 et résultats
skin texture without distortion.
collision detection in real-time.
integration with animation.
evolving appearance issues.
 Bibliography
Laparoscopic links by
Gilles Debunne
Official link for
AISIM
Official link for
CAESARE (the follow-up of AISIM)
Realistic Rendering of an Organ Surface in Real-Time
for Laparoscopic Surgery Simulation
Real-time Collision Detection for Virtual Surgery.
Pattern-based Texturing Revisited.
Bibliography
Laparoscopic links by
Gilles Debunne
Official link for
AISIM
Official link for
CAESARE (the follow-up of AISIM)
Realistic Rendering of an Organ Surface in Real-Time
for Laparoscopic Surgery Simulation
Real-time Collision Detection for Virtual Surgery.
Pattern-based Texturing Revisited.
 Contact
Contact  E-mail :
Adresse : Maverick / LJK -
INRIA ZIRST, 655 avenue de l'Europe
E-mail :
Adresse : Maverick / LJK -
INRIA ZIRST, 655 avenue de l'Europe
|
Fax : +33 (0)4 76 61 54 40 Secretariat : 76 61 54 26 (NB: I strongly prefer being contacted by email) |
|