Projet Image 2007
Remaillage semi-rťgulier par chartification
DU Xia, RONNAS Staffan, WOLFF Martin
Sommaire
Introduction
Le but du projet ťtait d'implementer une algorithme de remaillage proposť par Igor Guskov dans son papier Manifold-Based Approach to Semi-Regular Remeshing. Cette page est un prťsentation de notre travail : une dťscription de notre comprťhension de l'algorithme, un bilan des rťsultats que nous avons obtenus et une rťsumť de nos impressions du projet.
Malheureuesement, nous avons pas rťussi ŗ finir ŗ implťmenter tout l'algorithme dans le temps donnť, ce qui fait que ce rapport est incomplet au niveau de rťsultats. Nous prťsentons quand mÍme dans l'intťrÍt de complťtude notre idťe de comment la reste de l'algorithme fonctionnerait.
Description de l'algorithme
L'algorithme se divisent en cinq ťtapes, dťcrits plus en dťtail ci-dessous. D'abord on partitionne le maillage donnť en grandes rťgions (tiles) avec l'algorithme de chartification. A partir de cette division, un maillage trŤs simplifiť appelť le maillage de base est crťť. Avec ce maillage de base on construit une paramťtrisation initiale du maillage de dťpart, qui est ensuite optimisťe. Finalement, on obtient un maillage semi-rťgulier en raffinant le maillage de base.
Chartification
La chartification se fait itťrativement. On commence avec un ensemble des sommets du maillage (appelťs "germes") pris au hasard. En utilisant ces germes une diagramme de Voronoi est crťťe, c'est ŗ dire on partitionne les sommets en rťgions selon leurs distances aux germes. Puis on regarde si certaines conditions sont vťrifiťs qui servent ŗ assurer que le maillage de base crťť ŗ partir de ces rťgions aura des bonnes propriťtťs pour donner un maillage de rťsultat semi-rťgulier. DŤs que l'on trouve une condition qui n'est pas vťrifiťe, on ajoute une germe, on effectue un rťpositionnement des germes existants, et on calcul ŗ nouveau la partition.
Etant donnť un ensemble des germes, on partitionne les autres sommets du maillage en rťgions, "Voronoi tiles", en utilisant une gťneralisation de l'algorithme de Dijkstra avec plusieurs sommets de dťpart. Pour cela une file de prioritť est utilisťe. La prioritť est dťfinie comme la distance du sommet ŗ la germe la plus proche. Tant que la file n'est pas vide, on sort le premier ťlťment et on l'ajoute au tile le plus proche. Ensuite on ajoute ses voisins dans la file, oý on met ŗ jour leurs prioritťs s'ils y existent dťjŗ. L'algorithme se termine quand il n'y a plus d'ťlťment dans la file qui implique que chaque sommet est associť ŗ la germe la plus proche.
Les conditions ŗ vťrifier sont les suivants :
- "Encrouched boundaries (EB)" : Si un tile touche la frontiŤre d'un maillage contenant des trous, la germe doit Ítre un des sommets de cette frontiŤre. Cette condition est vťrifiťe en parcourant les tiles avec des trous en crťant une nouvelle germe sur la frontiŤre si l'existant n'y se trouve pas.
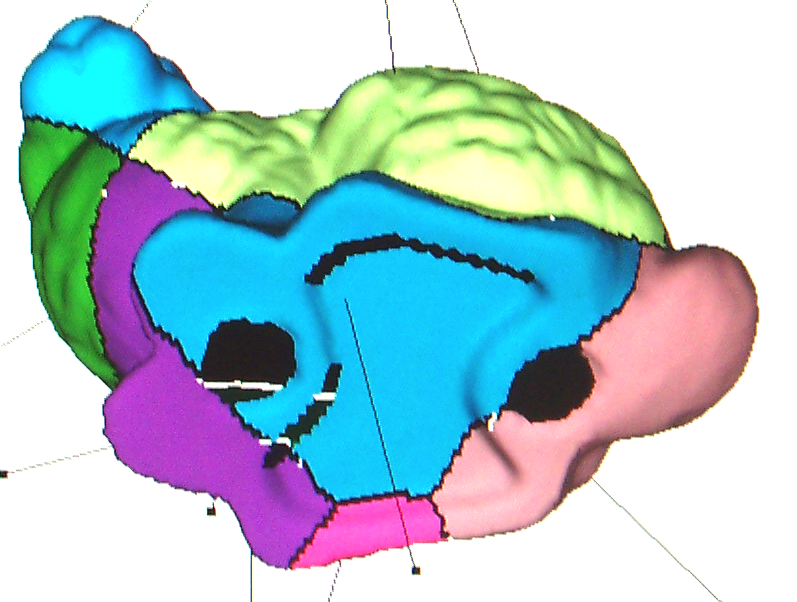
Fig. 1. Le tile turquoise touche la frontiŤre du maillage, mais sa germe n'y se trouve pas.
- "Non-zero genus (NZ)" : Le genus de chaque tile doit Ítre 0. Afin de vťrifier cette condition, un parcours des sommets sur la frontiŤre du maillage est effectuť. Si l'on trouve une cirucit des sommets sur la frontiŤre qui est contenue dans le tile, le genus n'est pas zťro, et on ajoute une germe adjacent ŗ l'ancienne germe.
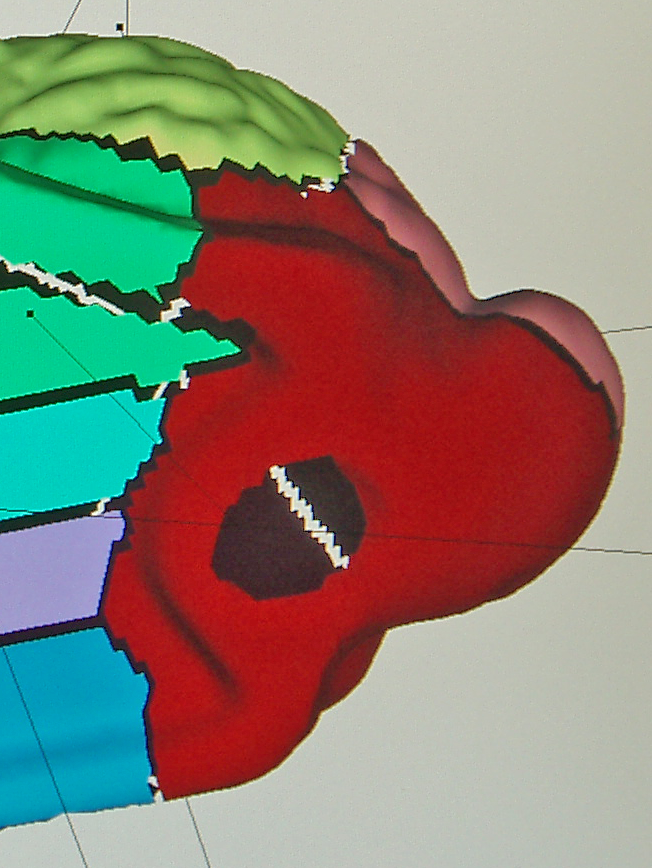
Fig. 2. Le tile rouge a un trou ŗ l'intťrieur - son genus est 1.
- "Multiple tile boundary components (MB)" : Le frontiŤre d'un tile avec ses voisins doit consister en un seule component connexe. Pour vťrifier cette condition, on prend un sommet qui a un voisin dans un autre tile (un sommet "sur la frontiŤre de la rťgion"), et on parcourt rťcursivement ses voisins qui se trouvent eux-mÍme sur la frontiŤre. Dans cette faÁon, on visite toute le component connexe contenant le sommet de dťpart. Si on trouve qu'on a parcouru tout les sommets qui forment la frontiŤre de ce tile, la condition est vťrifiťe. Sinon, on ajoute comme nouvelle germe un sommet voisin de l'ancienne.
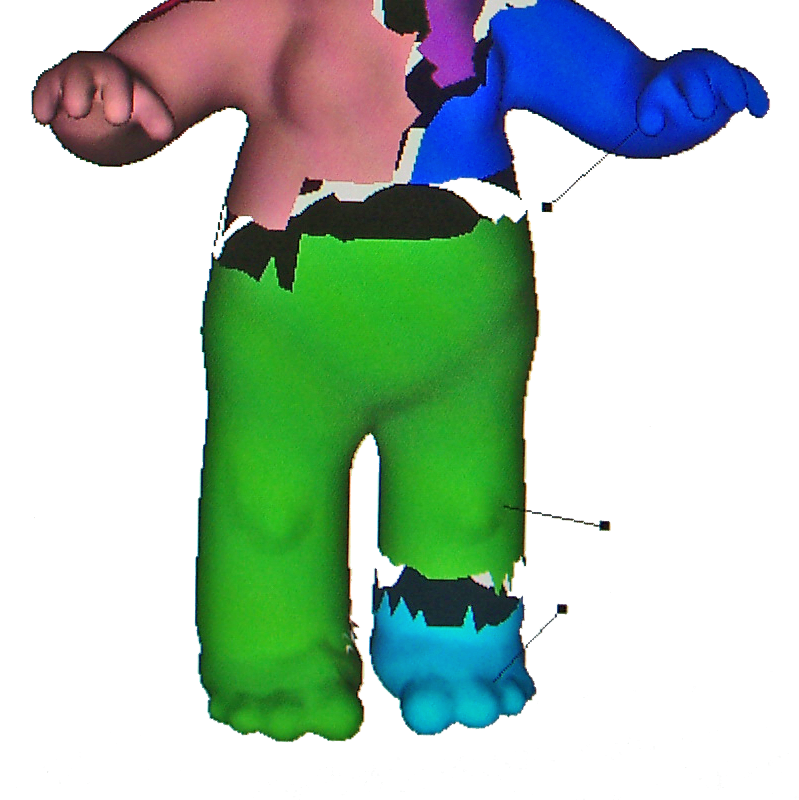
Fig. 3. Le frontiŤre du tile vert consiste en deux courbes qui ne sont pas connexe - une courbe sur le pied de Homer et un sur son ceinture.
- "Single curve tile boundaries (SC)" : Un tile ne doit avoir plus qu'un tile voisin sur chaque courbe de la frontiŤre. De ce que nous avons compris, cette condition devrait toujours Ítre vťrifiťe, alors on ne la vťrifie pas explictement dans le code.
- "Multiple neighbour instances (MN)" : La partie de la frontiŤre entre deux tiles doit Ítre connexe. La vťrification de cette condition consiste en d'abord groupant les sommets sur le frontiŤre de chaque tile selon les tiles dans lesquels ils ont des voisins. Ensuite pour chaque groupe, on commence avec un sommet et on trouve une chaÓne des sommets connectťs ŗ celui-ci. Si cette chaÓne ne contient pas tous les sommets du groupe, on a trouvť une violation de la condition, et on ajout comme nouvelle germe un des sommets avec un voisin adjacent de la plus court des courbes frontiŤres avec le tile concernť. En effet, comme les longeurs des courbes frontiŤres est assez compliquť ŗ calculer, une approximation est faite : on calcul les longeurs de deux components connexes des sommets au lieu de la "vraie" longeur de la frontiŤre.
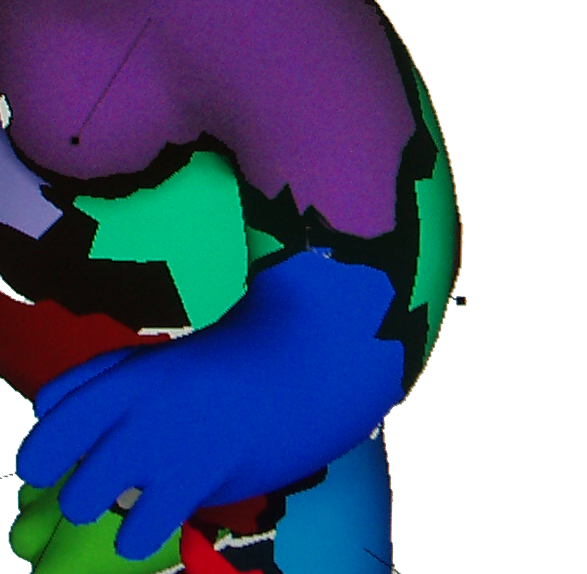
Fig. 4. La frontiŤre entre le tile vert clair et le tile violet n'est pas connexe - le tile bleu est au milieu.
- Aire et courbure limitťs : l'aire et la courbure des tiles ne doivent pas Ítre trop grands. Pour vťrifier cela une variance des vecteurs normales avec les aires des triangles comme poids est calculťe pour chaque rťgion. Le calcul entraine parcourir toutes les faces du tile en sommant le produit de ces aires et la difference entre leurs vecteurs normals et la moyenne des vecteurs normals pour toute la rťgion. Si la variance est supťrieur ŗ un seuil spťcifiť par l'utilisateur, une nouvelle germe et choisie entre les sommets adjacents ŗ la germe existante.
Le repositionnement des germes consiste simplement en remplacer chaque germe qui ne se trouve pas sur la frontiŤre du maillage par le sommet du tile le plus proche ŗ son barycentre.
Crťation du maillage de base
Le maillage de base est crťe ŗ partir des tiles calculťs dans l'ťtape de chartification. En effet, le maillage de base est la duale de l'ensemble des tiles Voronoi sur le maillage de dťpart. Autrement dit, on peut le crťer en associant un sommet ŗ chaque rťgion et en crťant une arrÍte entre deux sommets si leurs tiles sont voisins. On choisit naturellement comme sommets du maillage de base les germes des tiles.
En utilisant OpenMesh la rťalisation est dans ce cas un peu plus compliquťe que la thťorie. Pour crťer un maillage avec OpenMesh, il faut spťcifier les faces (pas les arrÍtes). Une face est spťcifiťe par un cycle de sommets et l'oriťntation d'une telle cycle, ce qui rend la crťation du maillage de base plus difficile. Le problŤme est qu'il est possible de crťer deux faces entre la mÍme suite de noeuds si leurs oriťntations sont opposťs, mais au mÍme temps il est impossible de crťer deux faces adjacentes ayant d'oriťntations opposťs.
La solution que nous avons utilisť est d'ajouter tous les germes des tiles au maillage de base et les parcourir en profondeur d'abord afin d'assurer la crťation des faces cŰte ŗ cŰte. Ensuite pour chaque sommet b, on crťe les faces dans le mÍme ordre dans la rťgion Ωb des faces adjacentes au sommet b et marque les sommets parcourus pour ťviter la crťation d'une mÍme face plusieurs fois. Afin d'ťviter de crťer la face incorrectes dans la rťgion Ωb, on utilise une liste ordonnťe des sommets voisins du sommets b, ce qui permette de crťer les faces cŰte ŗ cŰte. De plus, le premier sommet entrť doit Ítre une germe qui a dťjŗ ťtť parcouru s'il y en a. Pour les maillages contenant des trous, on ne crťer pas les faces entre deux sommets qui sont sur le bord du mÍme trou.
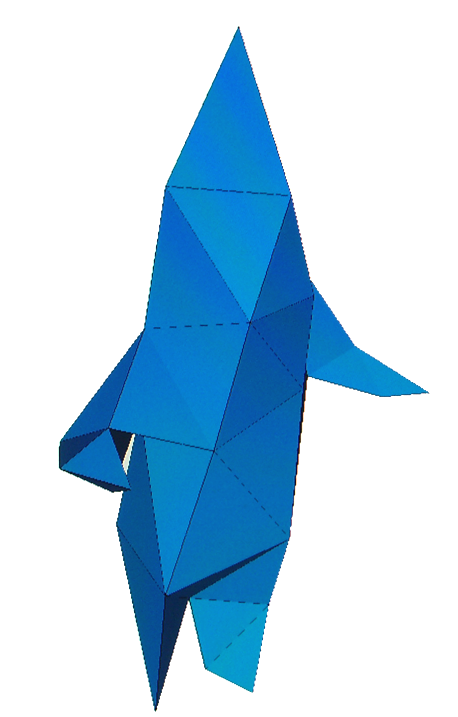
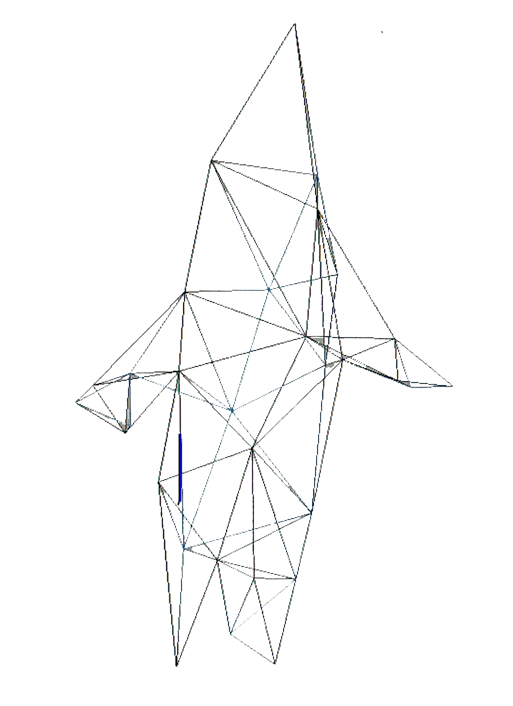
Fig. 5. Maillage de base de Homer
Crťation de la paramťtrisation initiale
Afin de retenir les caractťristiques du maillage de dťpart dans la reconstruction de celui-ci, on crťe une paramťtrisation. Ceci entraine associer ŗ chaque sommet du maillage de dťpart un point dans un atlas de carte de R^2. AprŤs avoir crťe une paramťtrisation initiale, celle-ci est optimisťe en minimisant une fonction d'energie.
La paramťtrisation initiale est calculťe en utilisant des coordonnťes moyennes ("Mean value coordinates"). Ces coordonnťes permettent d'exprimer un point dans une polygone comme une combinaision affine des coins de la polygone. En genťralisant directement le calcul en trois dimensions, on peut ainsi exprimer chaque sommet dans le maillage de dťpart comme une combinaison affine de ses voisins. Les points dans R^2 associťs aux sommets sont dťterminťs en imposant que chaque point peut Ítre exprimť comme la mÍme combinaison des points voisins. Ceci donne un systŤme linťaire ŗ rťsoudre.
Pour que ce systŤme ait une solution unique, il faut imposer des conditions aux limites, c'est-ŗ-dire spťcifier les points dans R^2 associťs aux points sur la frontiŤre de chaque tile du maillage de dťpart. Pour detťrminer ces conditions aux limites, on passe par le maillage de base, en postulant que les courbes frontiŤres des tiles de Voronoi sur le maillage de dťpart corrťspondent aux frontiŤres de tiles de Voronoi sur le maillage de base. Ces derniŤres sont simplement des droites passant par les barycentres des faces et mi-points des arrÍtes du maillage de base.
Ensuite on introduit ce que Guskov appelle une structure diffťrentielle sur le maillage de base. Il s'agit d'un ensemble d'applications (ou chartes) R_b, un pour chaque sommet b du maillage de base, de faces autour le sommet vers R^2. Ces applications, appelťs "polaires" entraine le calcul des coordonnťes barycentric et des fonctions complexe. En utilisant ces applications, on trouve les points dans R^2 qui correspondent aux points sur le frontiŤre des tiles dans le maillage de dťpart, ce qui permet de rťsoudre le systŤme pour les autres points. (Rťference : Floater, Parametrization and smooth approximation of surface triangulations
Dans l'implementation, on parcours les tiles et assemble pour chaque tile la matrice du systŤme en parcourant les sommets du tile. Pour les sommets sans voisins dans des autres tiles, les coordonnťes moyennes par rapport aux sommets voisins sont calculťes et stockťes dans la matrice. Les sommets restants sont parcourus sťperament. Pour chaque sommet, on doit maintenant d'abord calculer les points sur la frontiŤre avec les autres tiles. Ensuite, on peut calculer les coordonnťes moyennes du sommet par rapport ŗ ses voisins (qui comprises maintenant des autres sommets et les points sur la frontiŤre), et le stocker dans la matrice. AprŤs, on calcule les points dans R^2 correspondant aux points sur la frontiŤre comme dťcrit ci-dessus. Ces points permettent de crťer le second membre du systŤme.
Comme chaque tile peut contenir un nombre assez important des sommets, chacun seulement liťs ŗ un petit nombre des autres sommets, la matrice sera creuse, mais n'aura pas des autres bonnes propriťtťs comme Ítre symťtrique ou dťfini positive. En vue de ces conditions, nous utilisons un solveur de gradients bi-conjugťes (BiCGstab) (l'implementation utilisťe peut Ítre trouvťe ici) qui est basť sur la bibliothŤque BLAS. Pour le stockage de matrice, nous avons crťe notre propre type qui ťvite la stockage des zťros.
Optimisation de la paramťtrisation
Afin d'arriver ŗ un maillage semi-rťgulier, il faut que la paramťtrisation utilisťe dans la reconstructuion soit assez lisse. La paramťtrisation initiale ne prend en compte que les rťlations entre les sommets du maillage de dťpart ŗ l'intťrieur de chaque tile. Cette paramťtrisation doit Ítre modifiťe pour amťliorer sa continuitť. Guskov propose de faire cette modification de sorte qu'une certain fonction d'energie soit minimisťe. La fonction est en brťf une somme des erreurs entre le point dans R^2 associť ŗ un sommet dans le maillage de dťpart et la combinaison des points voisins avec des coordonnťes moyennes du sommet par rapport ŗ ses voisins. Le somme porte sur tout les sommets du maillage de dťpart avec tout les applications R_b possibles et utilise comme poids l'aire associť au sommet et la mÍme fonction spline utilisť dans la reconstruction du mailage.
Cette fonction est trop compliquť ŗ optimiser sur tout le maillage dans un coup, ainsi Guskov identifie deux types de rťgions sur le maillage de base qui se prÍtent ŗ une optimisation par partie. D'abord, on parcours les arrÍts du maillage de base et on considŤre le rťgion qui consiste des deux faces adjacents. Comme ce rťgion est assez compliquť, il faut d'abord faire une transformation des points de la paramťtrisation et de la fonction ŗ minimiser. AprŤs avoir fait cette transformation, une bibliothŤque d'optimisation qui fourni un methode de quasi-Newton (L-BFGS) est utilisťe pour trouver la configuration des points de la paramťtrisation qui minimise la fonction. L'appel ŗ cette bibliothŤque exige la dťfinition d'un mťthode qui calcule la valeur de la fonction et son gradient ŗ partir d'une configuration des points donnť. Comme point de dťpart on utilise pour la premiŤre arrÍt la paramťtrisation initiale crťe dans l'ťtape prťcťdent et ensuite les derniŤres points obtenus dans l'optimisation. En optimisant chaque rťgion, seulement les sommets qui ont tout ces voisins dans la rťgion seront modifiťs. A l'autre cŰtť, chaque sommet appartient ŗ plusieur rťgions et sera ainsi modifiť plusieurs fois.
AprŤs avoir optimisť avec les rťgions associťs aux arrÍts, on continue avec des rťgions assoicťs aux vertices. Pour chaque sommet dans le maillage de base, on considŤre la rťgion des points qui sont plus proche au sommet que un certain seuil, choisi tel que la fonction ŗ optimiser se simplifie beaucoup. Effectivement, le problŤme d'optimisation se rťduit ŗ calculer la paramťtrisation avec le methode utilisť quand la paramťtrisation intiale ťtait crťe. On trouve ainsi les sommets dans le maillage de dťpart dont le sommet correspondant sur le maillage de base est dans la rťgion. Pour tout les sommets qui ont tout leurs voisins aussi ŗ l'intťrieur du rťgion, on calcule les coordonnťes moyennes. Les sommets restants ne peuvent pas Ítre modifiťs pendant l'optimisation et leurs paramťtrisations courants sont utilisťs comme conditions aux limites. On assemble le systŤme linťaire et on le rťsout dans la mÍme maniŤre que precedemment. La paramťtrisation est mis ŗ jour avec la solution pour les sommets qui ont tout leurs voisins ŗ l'intťrieur du rťgion.
Reconstruction du maillage
La reconstruction du maillage est faite en deux ťtapes. D'abord, on sous-divise le maillage de base en divisant chaque triangle en 4 ("1-4 split") rťcursivement un certain nombre des fois, ce que nous donne un ensemble des sommets s sur le maillage de base. On applique ensuite une des applications R_b de la structure diffťrentielle du maillage de base pour obtenir un point dans R^2. On trouve ensuite le point sur le maillage de dťpart correspondant, en utilisant des coordonnťes barycentriques. Effectivement, on trouve le triangle des points dans R^2 dans lequel R_b(s) se trouve et on calcule les coordonnťes barycentrique de R_b(s) par rapport ŗ ces points. Pour retrouver le point dans le maillage de dťpart on calcule le combinaison affine des sommets correspondants aux points de la triangle avec les coordonnťes barycentriques.
Or, comme les domaines de dťfinition des applications R_b se chevauchent, il y en a normalement plusieurs qui peuvent Ítre utilisťs pour l'application vers R^2. Afin de prendre en compte tout ces possibilitťs, une moyenne des points reconstruit sur le maillage de dťpart est calculťe. Cette moyenne utilise comme poids une fonction spline cubique de la distance entre s et le sommet de maillage de base b.
Implementation
L'algorithme de Guskov
Nous avons commentť notre implťmentation de l'algorithme de Guskov avec doxygen. Pour accťder la page web du documentation de notre implťmentation veuillez suivre ce lien.
L'interface
Nous avons crťe une interface graphique pour exťcuter les diffťrents ťtapes de l'algorithme ŗ partir de l'interface de base fournie. Dans cette programme nous avons ajoutť la possibilitť de crťer une distribution initiale des germes et crťer une chartification. C'est aussi possible de spťcifier les diffťrents paramŤtres de l'algorithme, notamment le nombre des germes de dťpart, le nombre des sous-divisions du maillage de base utilisť dans la reconstruction, et les constants qui entrent dans les formules mathťmatiques des diffťrents ťtapes de l'algorithme. Pour bien pouvoir visualiser la chartification, le programme donne chaque face du maillage un couleur indiquant le tile auquel il appartient. Une lťgende pour cette coloriage est aussi affichťe. De plus, les germes de chaque tile peuvent Ítre affichťs.
Il reste encore beaucoup ŗ faire sur l'interface. Nous avons surtout essayť d'implementer l'algorithme de Guskov, ce qui a pris plus de temps que prťvu. Comme nous n'avons pas parvenu ŗ le finir, l'interface n'est pas trŤs dťveloppť.
Rťsultats
Comme nous n'avons pas rťussi ŗ implementer toute l'algorithme, les rťsultats qui suivent ne porte que sur les ťtapes de la chartification et la crťation du maillage de base et la paramťtrisation.
La chartification donne un rťsultat qui est correct au sens que l'ensemble des tiles obtenus satisfont les conditions, ce qui permette de crťer un maillage de base aprŤs. Par contre, le nombre de tiles, et ainsi la durťe d'ťxecution de cette ťtape, varie grandement entre les ťxecutions. Parfois, une chartification satisfaisant et trouvť presque tout de suite, autrefois la vťrification des conditions peut crťer un grand nombre des tiles. Comme le rťsultat dťpend de la distribution initiale des germes, qui est alťatoire, c'est difficile de contrŰler le rťsultat finale et le temps d'ťxecution. Ce dernier peut de temps en temps atteindre plusieurs minutes pour les grands maillages. Nous avons essayer de voir comment le nombre de tiles rťsultat varie comme fonction de nombre des tiles de dťpart. Fig. 6 montre le rťsultat pour le maillage Homer. Pour les maillages plus complťxes le nombre de tiles rťsultat ťtaient trop grand pour pouvoir faire des statistiques dans une maniŤre efficace.
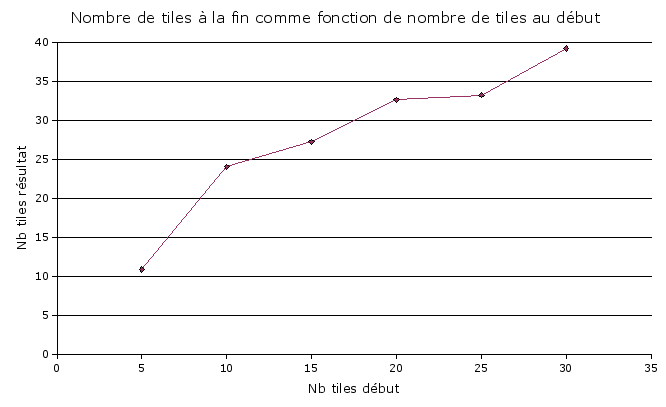
Fig. 6 La variation de nombre de tiles rťsultat comme fonction de nombre de tiles de dťpart pour Homer. Chaque point est un moyenne sur 10 distributions initiales diffťrents.
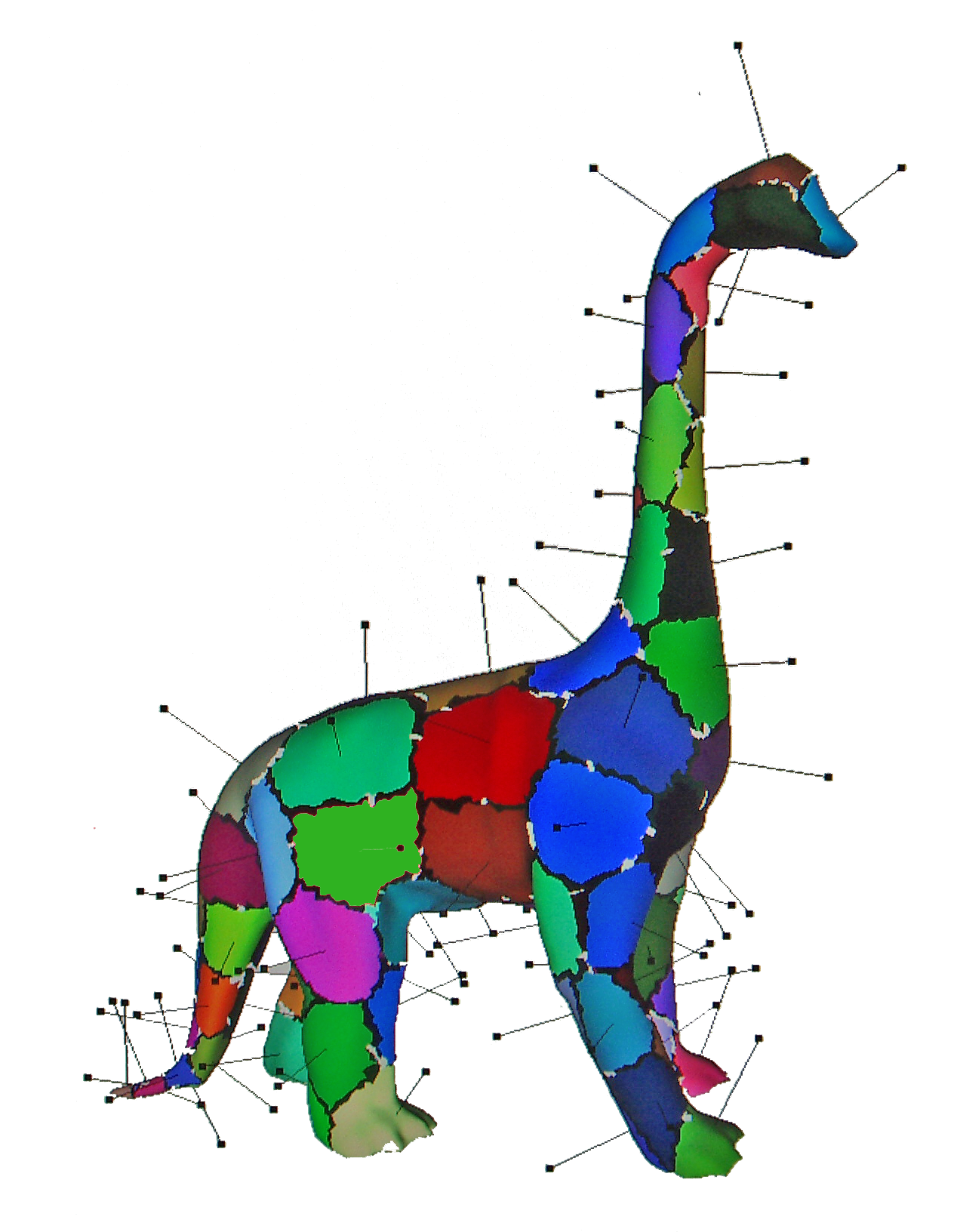
Fig. 7 Une chartification de Dino avec un grand nombre de tiles.
Pour pouvoir mieux contrŰler le rťsultat final, il aurait ťtť bon de permettre l'utilisateur de modifier la distribution initiale dans l'interface avant commencer la chartification, mÍme si cela contredira un peu l'idťe de l'algorithme qui selon Guskov est de ne pas exiger d'intervention humaine. Malheureusement, la myriade de problŤmes rencontrťe dans l'implementation de l'algorithme nous a empÍcher de amťliorer l'interface encore plus.
C'est surtout avec les maillages contenant des trous que nous avons vu que notre recherche d'une bonne chartification n'est pas toujours efficace. Effectivement, le programme ŗ tendence de crťer trop des petits tiles quand il y a un tile qui touche plusieurs trous. Une idťe pour se dťbarrasser cette condition serait d'imposer une borne infťrieur du nombre des vertices dans un tile et supprimer des germes qui les tiles deviennent trop petits. Il faudrait dans ce cas faire attention de assurer la bonne convergence du methode.
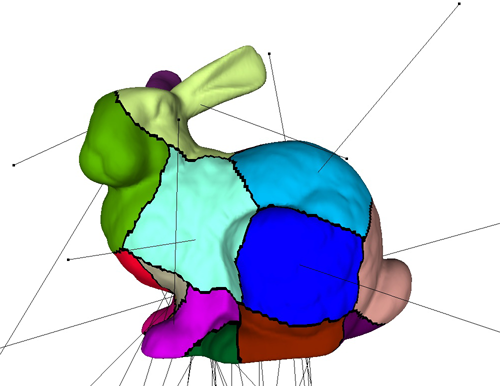
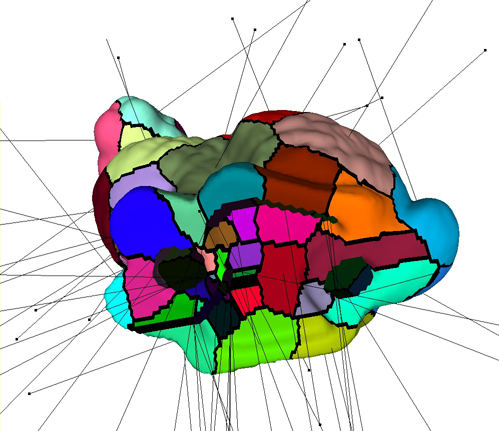
Fig. 8. Le maillage marche souvent mieux dans les rťgions sans trous (gauche) que lŗ oý il y a des trous (droite).
La crťation du maillage de base semble marcher bien. Les rťsultats corresponds ŗ ce que on s'attend. Le problŤme est que ils sont parfois un peu trop dťtaillťs pour permettre un calcul rapide de la paramťtrisation, mais ceci est la consťquence d'un grand nombre de tiles dans la chartification.
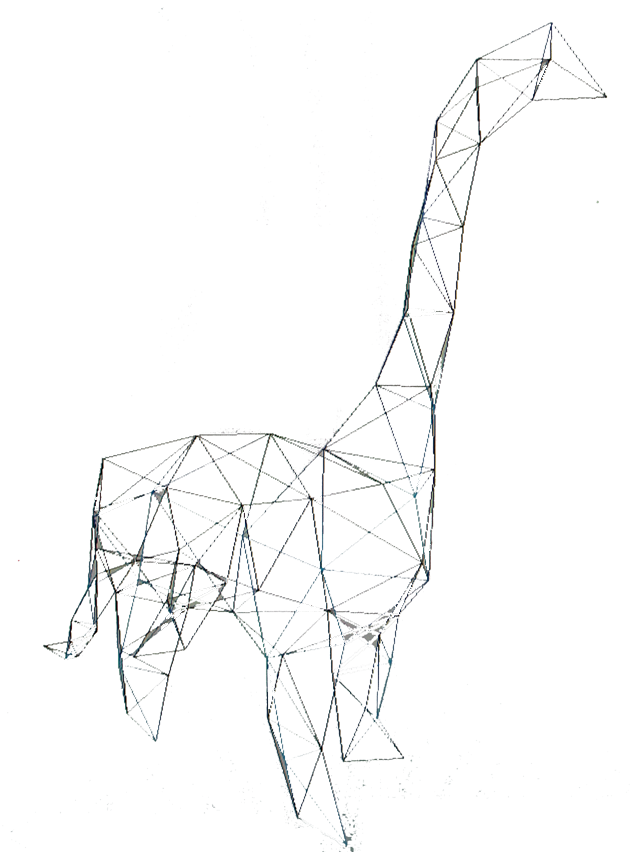
Fig. 9. La construction du maillage de base marche bien sont trop dťtaillťs dans les cas oý la chartification a crťť trop de tiles.
Nous avons aussi mťsurť le temps de calcul, avec le maillage Homer. Pour ce maillage la chartification fonctionne bien, et on a une croissance linťaire avec le temps. C'est intťressant de voir que le calcul de la paramťtrisation initiale dťcroit legŤrement avec le nombre de tiles, ce que nous pensons est due au fait que les systŤmes linťaires rťsolus sont plus petits, ce qui donne une convergence plus rapide. L'ťtape de reconstruction (resampling) est dominant, mais comme cette ťtape n'est pas mise au point, ce n'est pas trŤs intťressant de le comparer avec les autres. Pour les autres maillages le temps de calcul de la chartification est beaucoup plus important due au grand nombre de tiles qui sont souvent crťes.
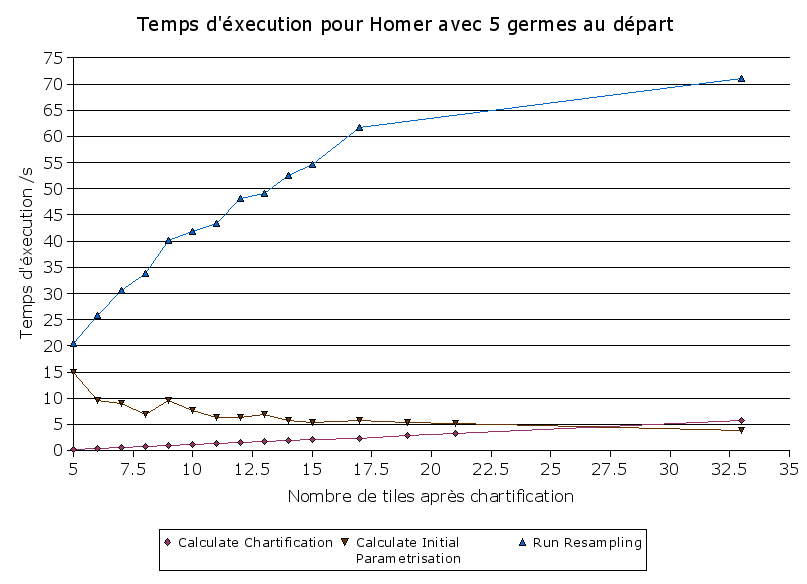
Fig. 10 Le temps d'ťxecution des diffťrents ťtapes avec le maillage Homer.
Nous avons implementť les ťtapes de la crťation et de la paramťtrisation initiale et la reconstruction du maillage, mais nous n'avons pas obtenu de rťsultats satisfaisants. Nous pensons que la faute se trouve dans le code de reconstruction, et que la paramťtrisation est correcte (voir Fig. 11). Cependant, nous n'avons pas pu tester les deux ťtapes sťparament. Le premier pas de la reconstruction, la sous-division, fonctionne correctement. Pour l'ťtape d'optimisation nous n'avons fait qu'une squelette de l'implťmentation.

Fig. 11. Dino aprŤs la sous-division.
Impressions sur le projet
MÍme si nous sommes dťÁus de ne pas avoir parvenu ŗ finir implťmenter tout l'algorithme, nous avons trouvť le projet trŤs intťressant. Il nous a permis d'apprendre les idťes de base du sujet de maillages et les algorithmes associťs, dont nous ne connaissions pas avant. Se plonger dans un problŤme tout nouveau et assez complexe a ťtť stimulant mais aussi parfois frustrant. Nous avons dŻ chercher des informations et clarifications dans des papiers scientifiques oý le contexte des problŤmes traitťs ťtait souvent implicite, et non pas toujours le bon pour nos questions.
A notre avis la raison de notre ťchec de finir le projet se trouve surtout dans son complexitť et notre manque d'expťrience du sujet. Nous avons plusieurs fois pensť avoir trouvť une solution ŗ un problŤme, et, seulement aprŤs avoir l'implementť (et deboggť), dťcouvert que notre idťe ťtait totalement erronťe. L'exemple la plus ťvident ťtait notre mťprise pour le calcul de la paramťtrisation initiale. En recul, c'est clair que nous aurions dŻ poser plus de questions et chercher plus d'aide quand nous avions de problŤmes.
La bibliothŤque que nous avons utilisť pour la traitement des maillages, OpenMesh, ťtait un grand aide dans le travail. Nous l'avons trouvť assez intuitive et facile ŗ comprendre et utiliser, mÍme si son documentation laisse beaucoup ŗ dťsirer. Seulement les mťthodes de crťation des maillages nous resemblait un peu compliquťs. Aussi, les methodes fournis par OpenMesh sont d'assez bas niveau : il n'existe pas par exemple quelque chose qui permet de chercher l'arrÍt entre deux sommets. Nous aurions peut-Ítre du nous-mÍme ťcrire une module avec des fonctions auxiliaire pour faire des choses rťcurrents comme cela pour simplifier notre code.
Layout de cette page web utilise le stylesheet de l'ťquipe "Antoine MELER & Adrien BERNHARDT" de l'annťe 2006.
top
Grenoble, le 15 juin 2007